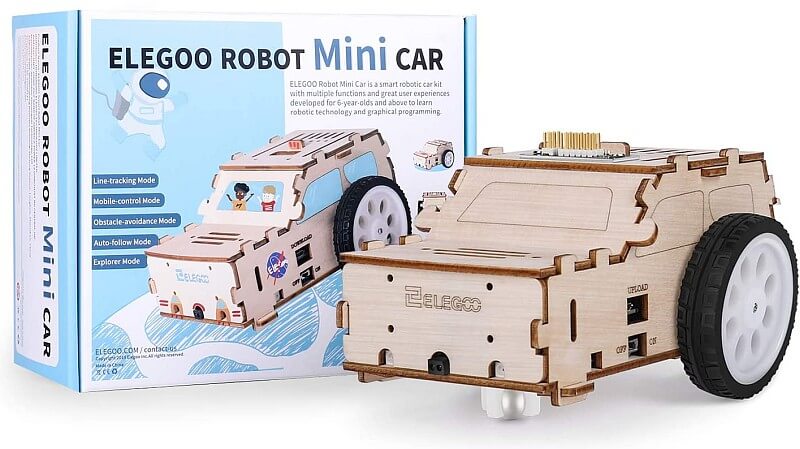
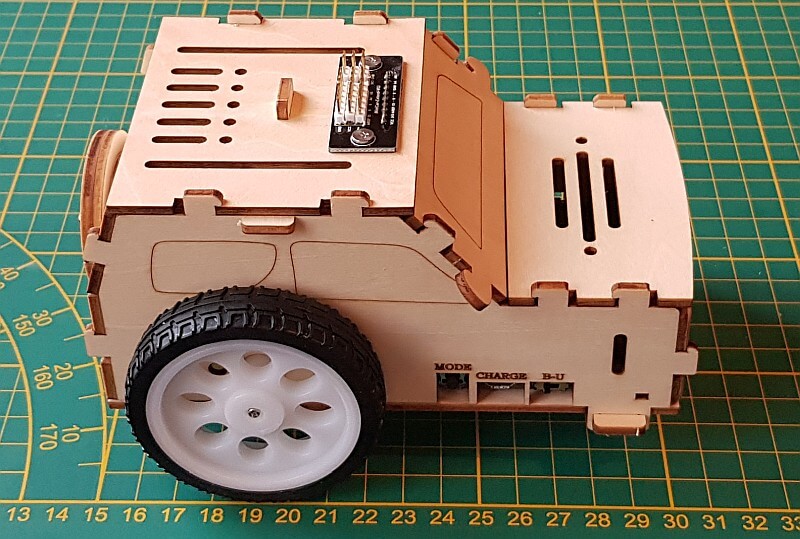
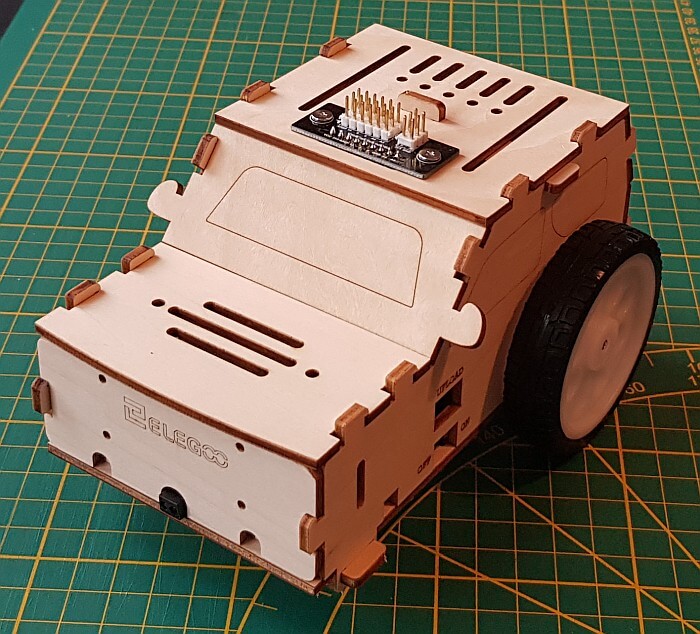
Dieser Bausatz war als Geschenk für ein 10-jähriges Kind gedacht und ist mehr als nur ein ferngesteuertes Auto. Zufällig entdeckte ich dieses Kit bei Amazon (leider momentan nicht mehr verfügbar) und bestellte es sofort, da es nicht nur einen guten ersten Eindruck durch sein Holzchassis als auch interessante Möglichkeiten zur Ergänzung und Programmierung versprach.
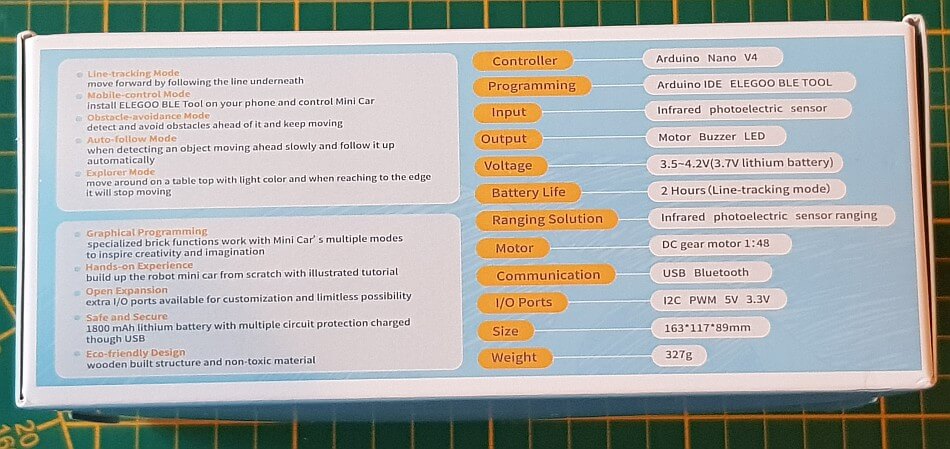

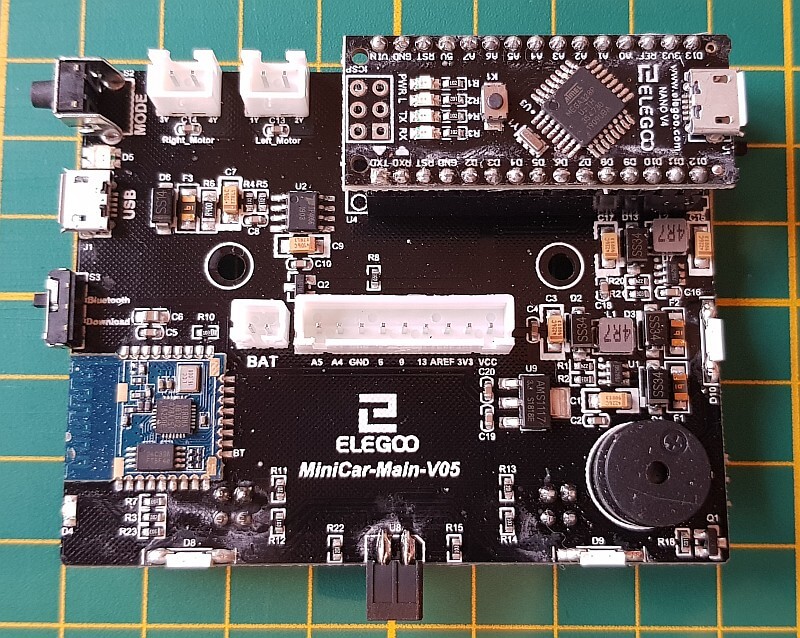
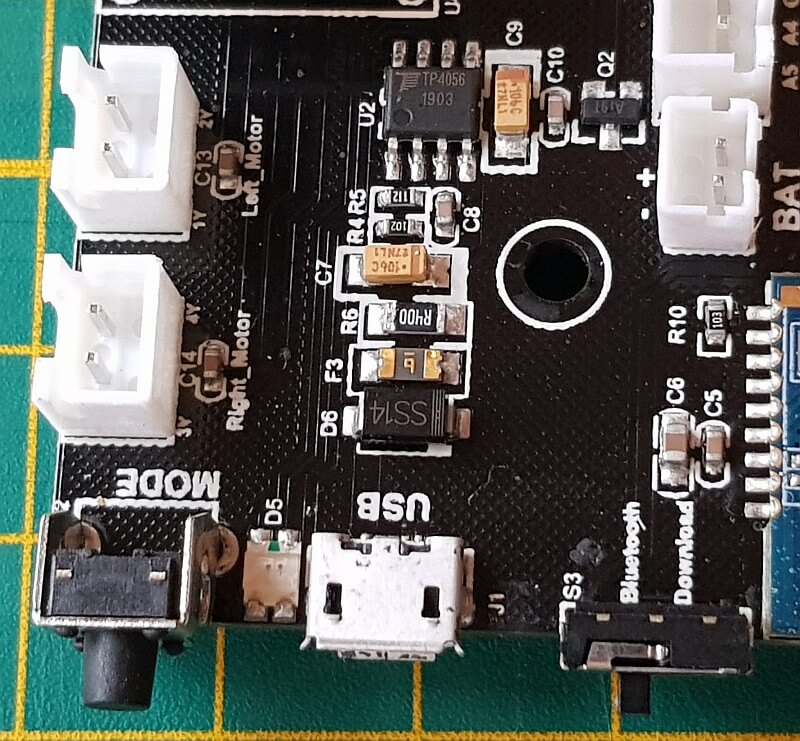
Das Herzstück des Roboters ist ein Arduino Nano v4, der die gesamte Steuerung übernimmt. Die Software für die beschriebenen Betriebs-Modi ist schon fertig auf den Chip geladen, so dass der Bausatz nur zusammengebaut und der Akku geladen werden muss.
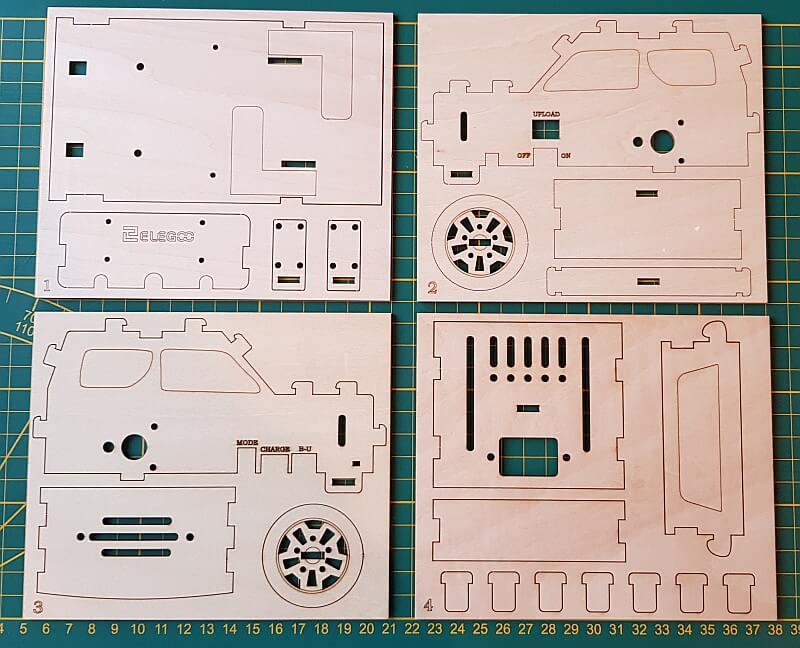
Die Bau-Anleitung für das Elegoo Robot Mini Car ist recht gut und übersichtlich gestaltet und liegt sowohl in gedruckter Form und englischer Sprache bei, ist aber auch online in anderen Sprachen erhältlich. Kinder können zwar die Schritte leicht verstehen, aber sollte ein Erwachsener helfen, denn manche Holzverbindungen sind etwas schwergängig und verlangen ein wenig Geschickt, so dass nichts zu Bruch geht.


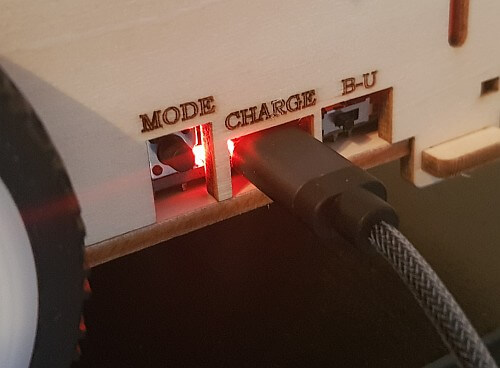
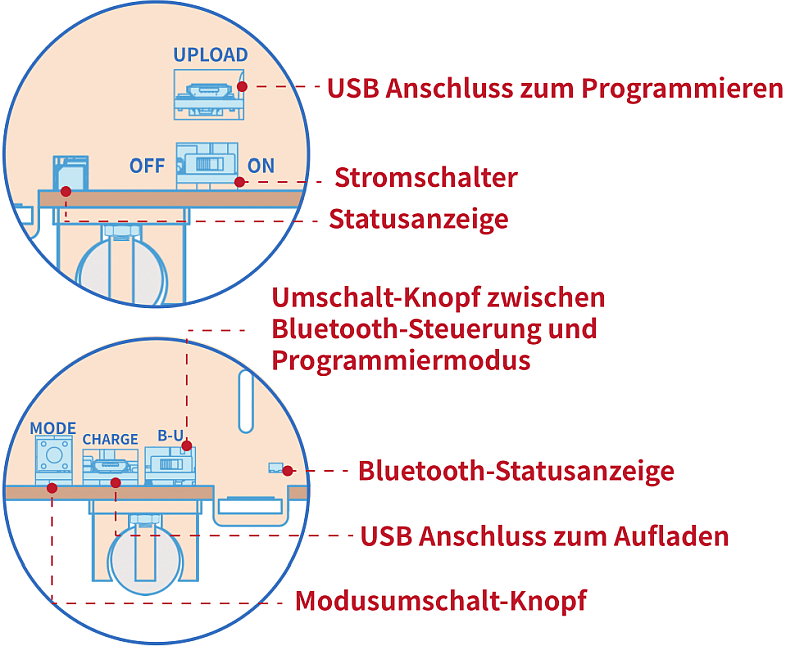
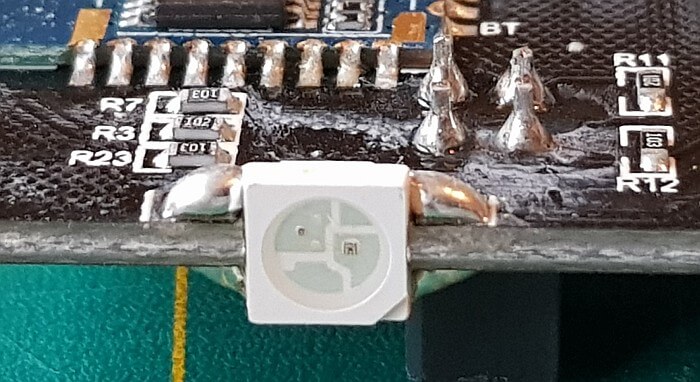
Nach dem Anschalten es Mini-Car einmal den Modusumschalt-Knopf drücken. Die beiden RGB-LEDs
an der Vorderseite des Fahrzeugs leuchten grün
und zeigen damit an, dass der Line-Tracking-Modus aktiviert ist. Das Fahrzeug sollte dann auf
einer schwarzen Linie (~2cm breit) platziert werden und es fährt dann automatisch dieser Linie entlang.
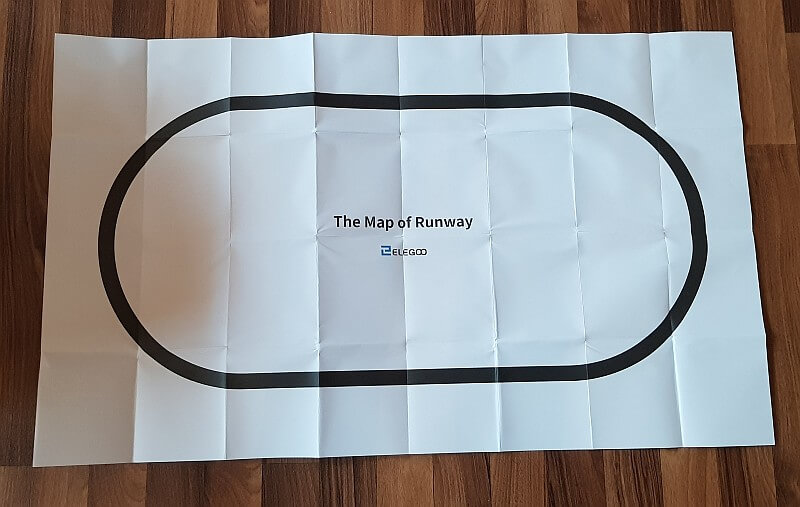
Für den D2-1 Tracking Car hatte ich schon einige Vorlagen zur Erstellung eines
Linienplans zur Verfügung gestellt; diese können dann zu einem größeren
Plan zusammengelegt werden, um längere und/oder schwierigere Strecken zu bauen.
Ein zweites Drücken auf den Modusumschalt-Knopf lässt die beiden RGB-LEDs gelb
aufleuchten und der Hindernis-Vermeidungs-Modus ist aktiviert. Da Fahrzeug fährt dann sofort automatisch geradeaus los,
bis es innerhalb von 10cm vor sich ein Hindernis erkennt. Dann versucht es, dies zu Umfahren.
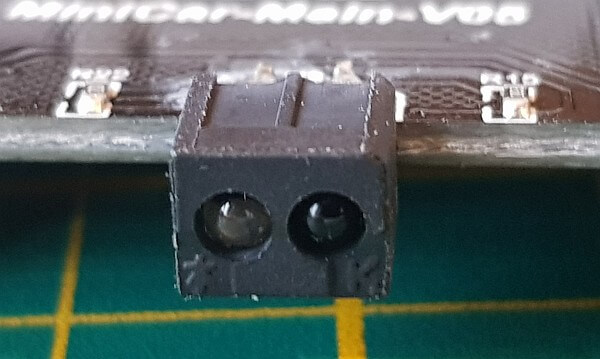
Da Hindernisse mit einem IR-Sensor und einer IR-LED erkannt werden sollen, gab es bei mir ziemliche Probleme schon beim
Geradeausfahren, wenn normales Tageslicht oder helle Innenraumbeleuchtung auf das Fahrzeug fällt. In weniger gut beleuchteter
Umgebung funktioniert zwar die Hindernis-Erkennung ganz gut, aber die Umfahrung ist nur zuverlässig, wenn das Hindernis (z.B.
ein Schrank) direkt von vorne angefahren wird. Steuert das Fahrzeug das Hindernis in einem Winkel (<45°) an, dann bleibt
es oft am Hindernis hängen. Hier könnte einer Erweiterung mit einem Ultraschall-Modul oder mehreren
IR-Sensoren helfen.
Ein drittes Drücken auf den Modusumschalt-Knopf lässt die beiden RGB-LEDs blau
aufleuchten und der Modus für automatisches Folgen ist aktiviert. Hierbei soll das Fahrzeug einem Objekt folgen, welches sich innerhalb
von 10cm vor ihm befindet.
Dies funktioniert zwar recht zuverlässig, aber da es nur einen IR-Sensor auf der Vorderseite des Fahrzzeugs gibt, kann in diesem
Modus nicht erkannt werden, ob das Objekt eine Kurve macht und somit bleibt das Fahrzeug stehen, wenn das vorrausfahrende Objekt
abbiegt oder aus dem Bereich des Sensors gerät.
Ein viertes Drücken auf den Modusumschalt-Knopf lässt die beiden RGB-LEDs weiß
aufleuchten und der Explorer-Modus ist aktiviert. Wenn das Fahrzeug auf einen hellen Tisch gestellt wird, dann fährt es automatisch
los und vermeidet Hindernisse innerhalb von 10cm. An Tischkanten stoppt es automatisch.
Ich habe diesen Modus nur auf dem mitgelieferten, gedruckten Linienplan ausprobiert und es scheint recht gut zu funktionieren. Innerhalb
der schwarzen Linien bleibt das Fahrzeug sofort stehen und weicht aus, wenn es z.B. eine hochgeklappte Falte im Papier "sieht".
Die Unterlage muss wirklich gleichmäßig hell sein, denn ein gemaserter Holztisch hat überhaupt nicht funktioniert, weil anscheindend
die dunklen Holzmasern schon als Tischkante interpretiert wurden.
Ein fünftes Drücken auf den Modusumschalt-Knopf lässt die beiden RGB-LEDs erlöschen und der Standby-Modus ist aktiv, d.h. das Fahrzeug führt keine Aktionen mehr durch.
Um das Fahrzeug mit dem Smartphone (hier: Android) zu verbinden, sind folgende Schritt erforderlich (detaillierte Anleitung stellt der Hersteller zur Verfügung):
Das Fahrzeug kann nun entweder mit einem virtuellen Joystick manuell ferngesteuert werden oder die oben beschrieben Modi können nun auch per Smartphone geschaltet werden.
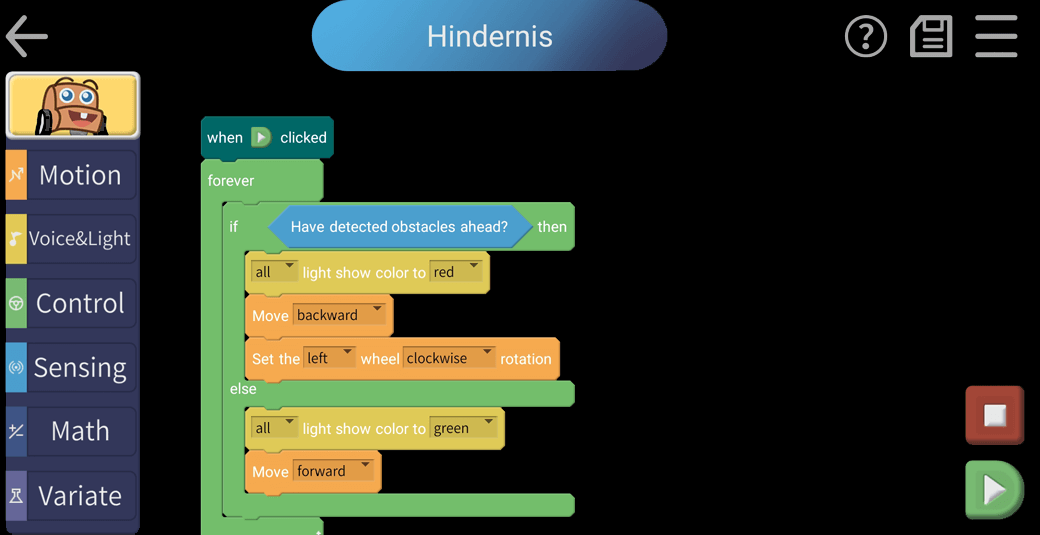
Die App stellt auch die Möglichkeit der Fernprogrammierung des Fahrzeugs zur Verfügung. Dazu muss man in der App statt
Druckkopfsteuerung auf Programmierung drücken und man bekommt eine visuelle Oberfläche, auf der man
verschiedene Befehle in ein Programm zusammenfassen und anschließend an das Fahrzeug übermitteln kann.
Für Personen ohne spezielle Erfahrung und/oder Kinder ist dies eine wirklich gute Gelegentheit, hier in die Welt
der Programmierung einzusteigen. Das folgende Programm soll den Modus 2: Hindernis-Vermeidung nachbilden
und funktioniert fast besser als das Original. 😉