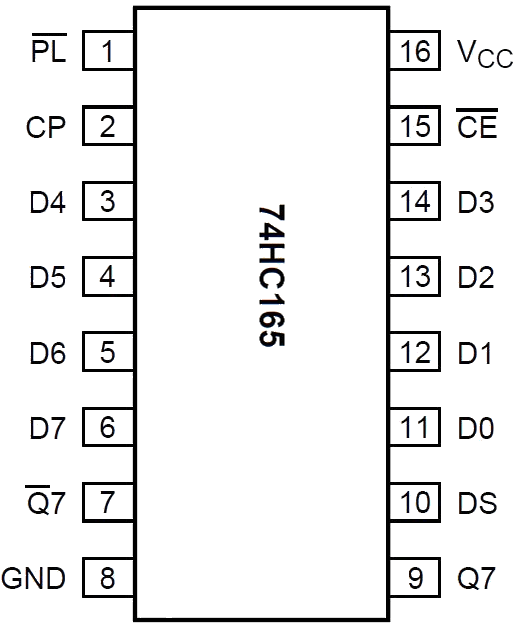
Mit dem Schieberegister 74HC165 lassen sich bis zu 8 Eingang-Pins gleichzeitig verarbeiten, wobei aber nur 3 Pins auf der Seite des Mikrocontrollers (z.B. Arduino) benötigt werden. Durch Verwendung von mehreren Schieberegistern können noch weitaus mehr Pins angesteuert werden.
| Pin | Symbol | Beschreibung |
|---|---|---|
| 1 | PL | "Parallel Load" (active low) |
| 2 | CP / CLK | "Clock" |
| 3 | D4 | Eingangspin #4 |
| 4 | D5 | Eingangspin #5 |
| 5 | D6 | Eingangspin #6 |
| 6 | D7 | Eingangspin #7 |
| 7 | QH / Q7 | "Serial Out" (active low) |
| 8 | GND | Ground / Masseanschluss |
| 9 | QH / Q7 | "Serial Out" |
| 10 | SER / DS | "Serial In": zur Verkettung mehrerer Schieberegister |
| 11 | D0 | Eingangspin #0 |
| 12 | D1 | Eingangspin #1 |
| 13 | D2 | Eingangspin #2 |
| 14 | D3 | Eingangspin #3 |
| 15 | CE | "Clock Enable" (active low) |
| 16 | VCC | Stromversorgung (5V) |
Grundsätzlich ist die Funktionsweise invertiert zum Schieberegister 74HC595,
welchen aus einem seriellen Eingangssignal 8 parallele Ausgangssignale generierte. Das 74HC165 generiert nun
aus 8 parallel anliegenden Eingangssignalen ein serielles Ausgangssignal.
Sobald PL aktiviert wird (HIGH), werden die internen Register mit dem Zustand der Eingangspins 1-8 befüllt
uns stehen nun am Ausgang bereit. Durch aufeinander folgendes aktivieren (Flanke zu HIGH) werden die Zustände
nun nacheinander durch den Ausgang QH geleitet.
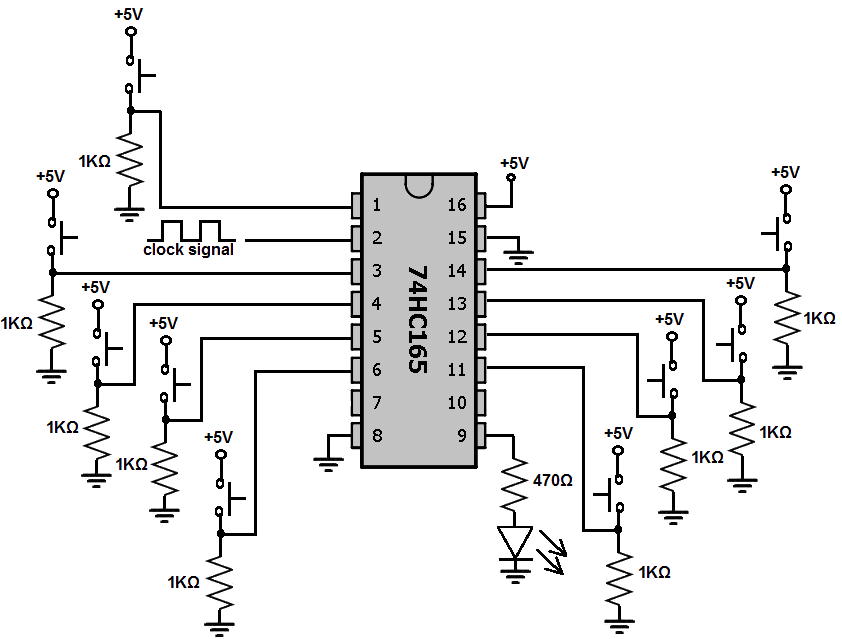
Zunächst wird der 74HC165-Baustein mit Tastern und ohne Mikrocontroller (oder ähnliche Steuerung) getestet.
Dazu wird am PL- und CLK-Pin jeweils ein Mikrotaster angeschlossen und am Ausgang eine LED, die die End-Zustände
anzeigen soll. Ein DIP-Schalter (="Mäuseklavier") wird zum Setzen der Eingänge verwendet.
Sobald die Stromversorgung verbunden wird, kann man mit aktivieren des PL-Pins die internen Register befüllen.
Durch je einen Druck des Mikrotasters bei CLK wird nacheinander der Zustand der Eingänge zum Ausgang weitergegeben
und die LED leuchtet, wenn ein Eingang mit HIGH beschaltet wurde und erlischt, wenn der entsprechende
Eingang mit LOW beschaltet wurde.
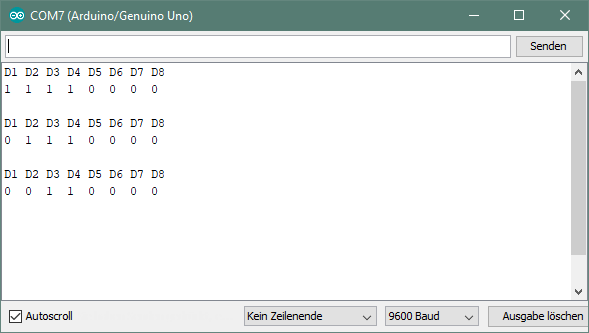
Nun wird PL, CLK und CE durch Pins des Arduinos verbunden, um so die Steuerung den Mikrocontroller übernehmen zu lassen. Statt einer LED am Ausgang werden die Ergebnisse in der seriellen Konsole ausgeben.
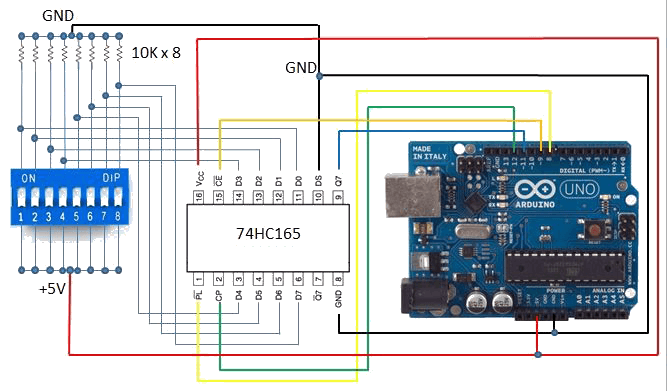
Der folgende Sketch liest jede Sekunde die Daten am Ausgang des 74HC165 und gibt sie in der seriellen Konsole aus, wenn Änderungen festgestellt werden.
#define AMOUNT_IC 1 // amount of used 74HC165 chips
#define DATA_WIDTH AMOUNT_IC * 8
#define PIN_PL 8
#define PIN_CE 9
#define PIN_Q7 11
#define PIN_CLK 12
unsigned long pinValues, oldPinValues;
void setup()
{
Serial.begin(9600);
pinMode(PIN_PL, OUTPUT);
pinMode(PIN_CE, OUTPUT);
pinMode(PIN_CLK, OUTPUT);
pinMode(PIN_Q7, INPUT);
digitalWrite(PIN_CLK, LOW);
digitalWrite(PIN_PL, HIGH);
pinValues = readShiftRegisters();
printByte();
oldPinValues = pinValues;
}
void loop()
{
pinValues = readShiftRegisters();
if (pinValues != oldPinValues) {
printByte();
oldPinValues = pinValues;
}
delay(1000);
}
unsigned long readShiftRegisters()
{
long bitVal;
unsigned long bytesVal = 0;
digitalWrite(PIN_CE, HIGH);
digitalWrite(PIN_PL, LOW);
delayMicroseconds(5);
digitalWrite(PIN_PL, HIGH);
digitalWrite(PIN_CE, LOW);
for (byte i = 0; i < DATA_WIDTH; i++) {
bitVal = digitalRead(PIN_Q7);
bytesVal |= (bitVal << ((DATA_WIDTH - 1) - i));
digitalWrite(PIN_CLK, HIGH);
delayMicroseconds(5);
digitalWrite(PIN_CLK, LOW);
}
return (bytesVal);
}
void printByte()
{
for (byte i = 0; i <= DATA_WIDTH - 1; i++) {
Serial.print("D" + String(i + 1) + " ");
}
Serial.println("");
for (byte i = 0; i <= DATA_WIDTH - 1; i++) {
Serial.print(pinValues >> i & 1, BIN);
Serial.print(" ");
}
Serial.println("\n");
}