
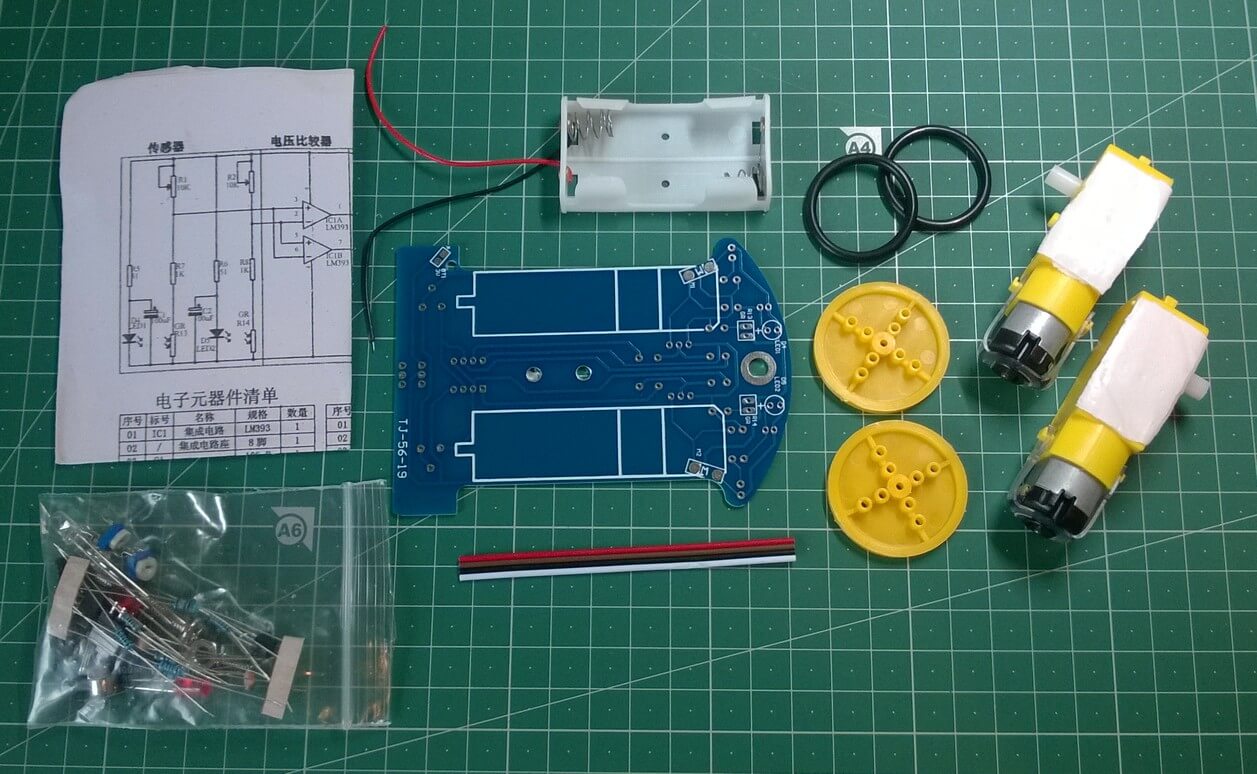
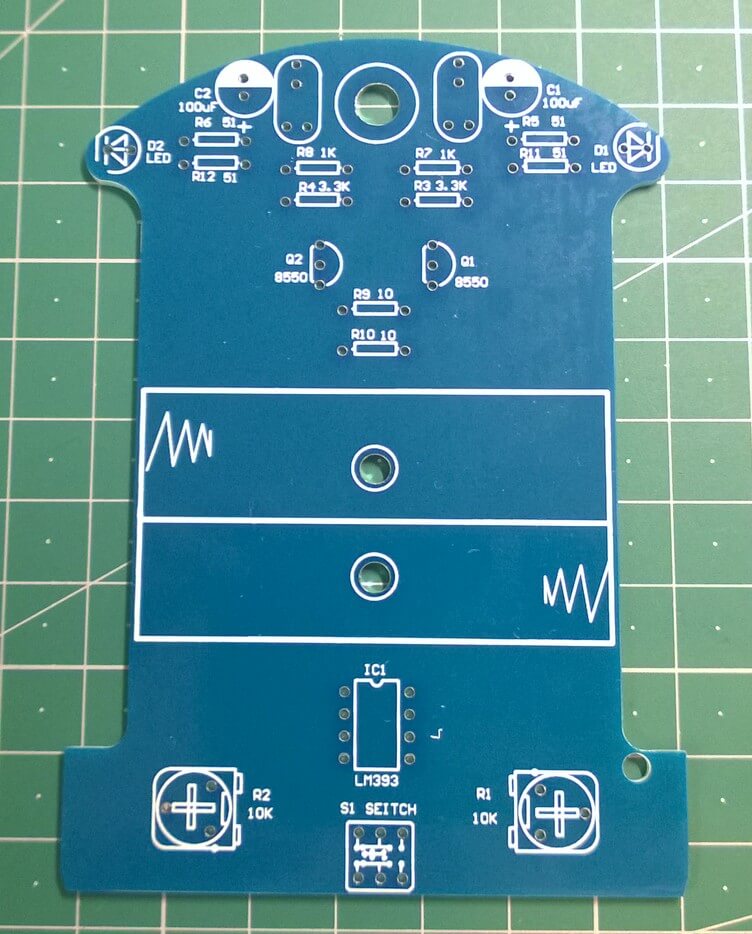
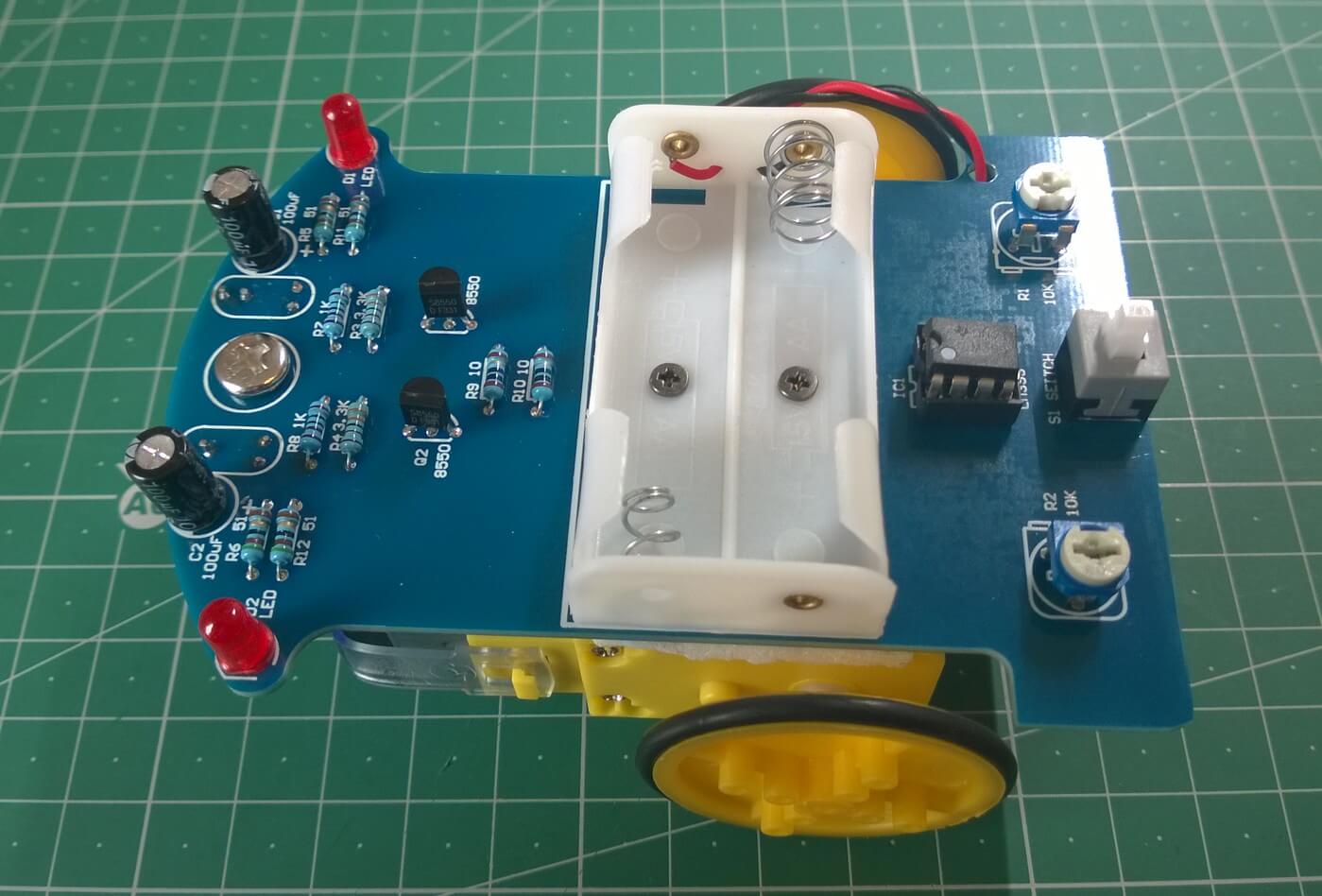
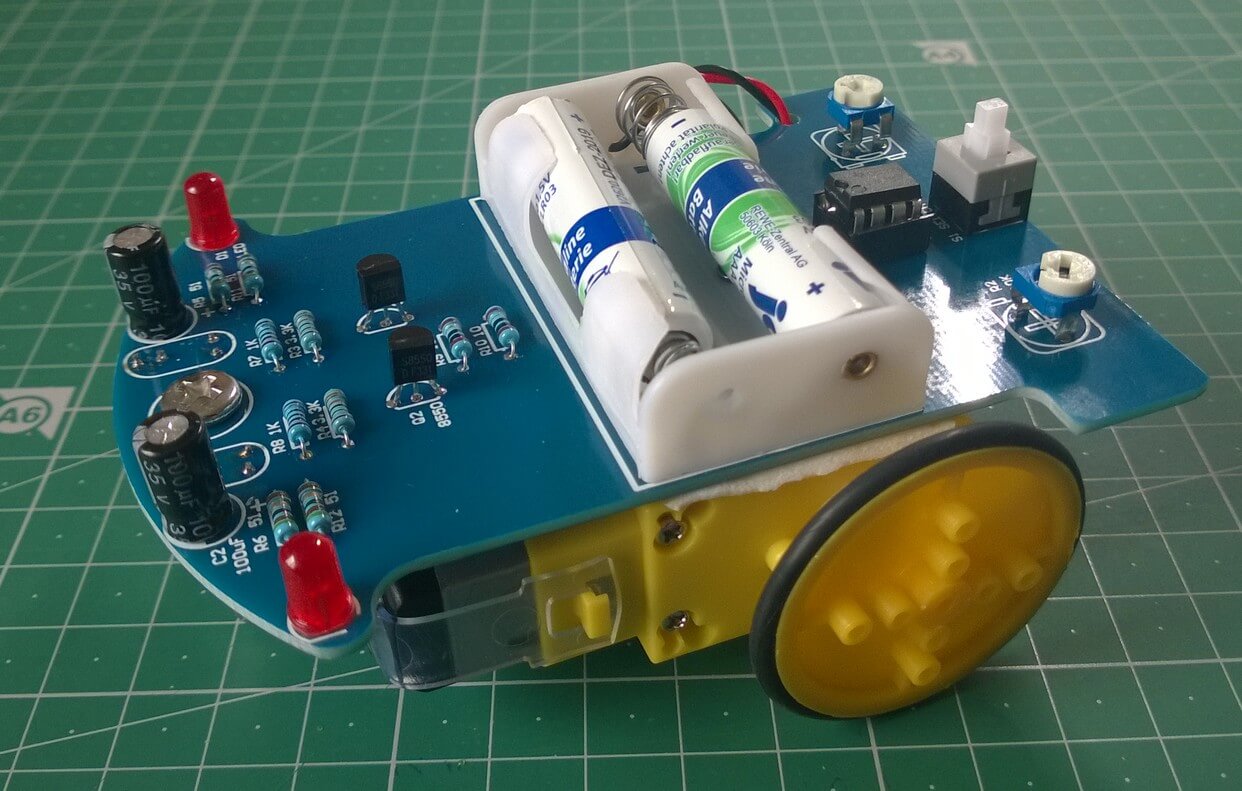
Bei einer Bestellung mit elektronischen Bauteilen hatte ich mir auch aus reiner Neugier den Bausatz eines "D2-1 Tracking Car" dazu bestellt. Hier ist der Zusammenbau und das Ergebnis des Tests mit diesem sog. "Line following robot".
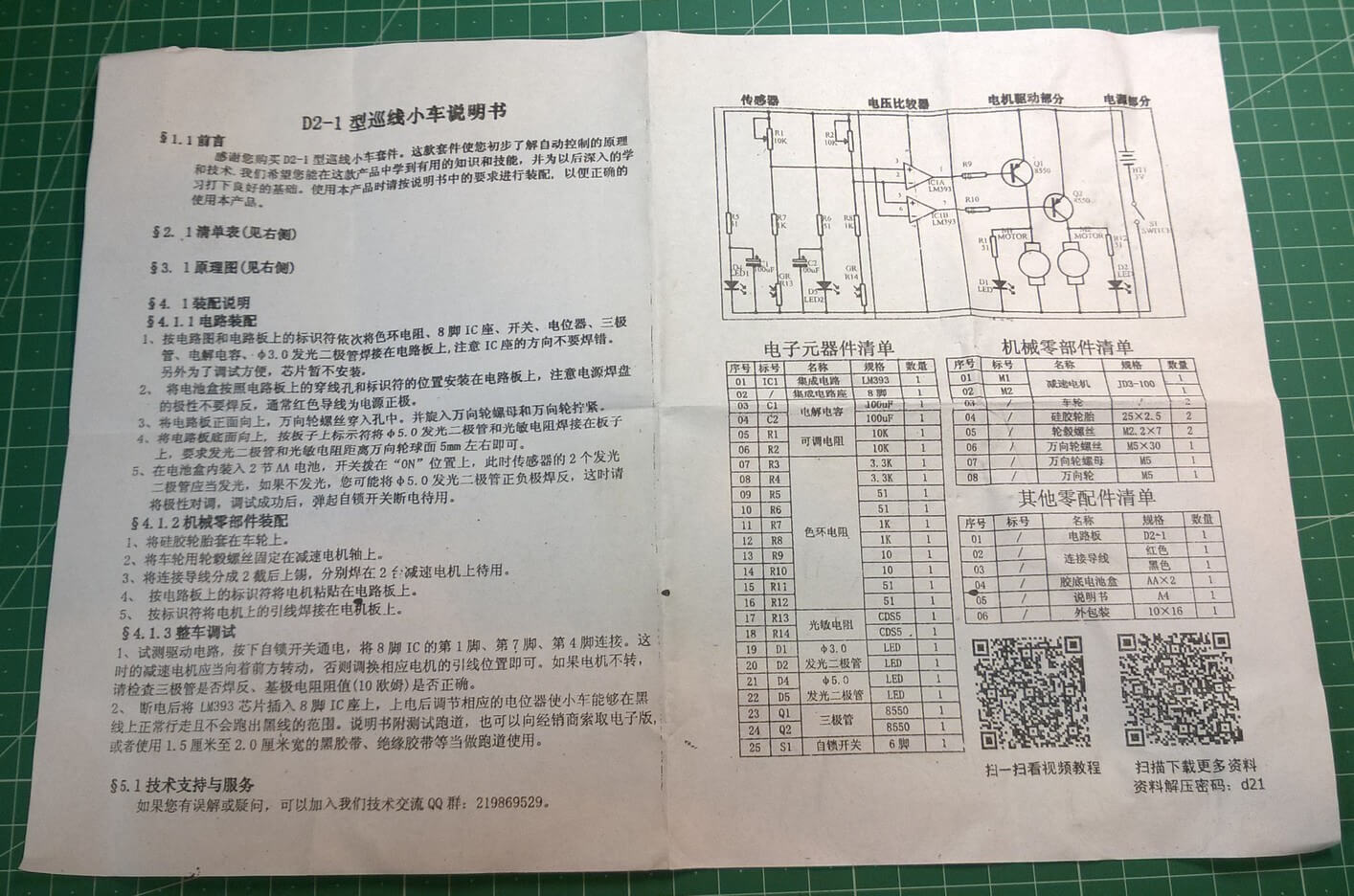
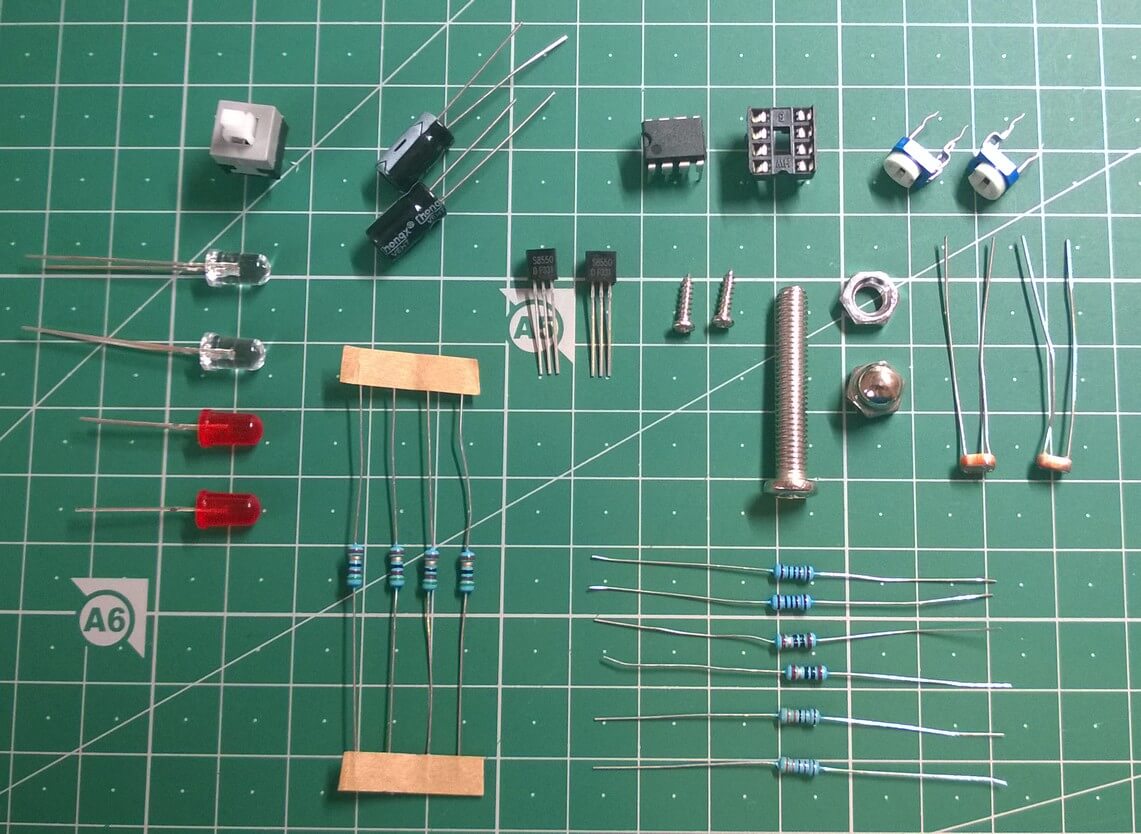
Laut der beigelegten Anleitung (auf chinesisch) sind in dem Bausatz folgende elektrischen Bauteile enthalten:
| Anzahl | Bauteil | Nummerierung |
|---|---|---|
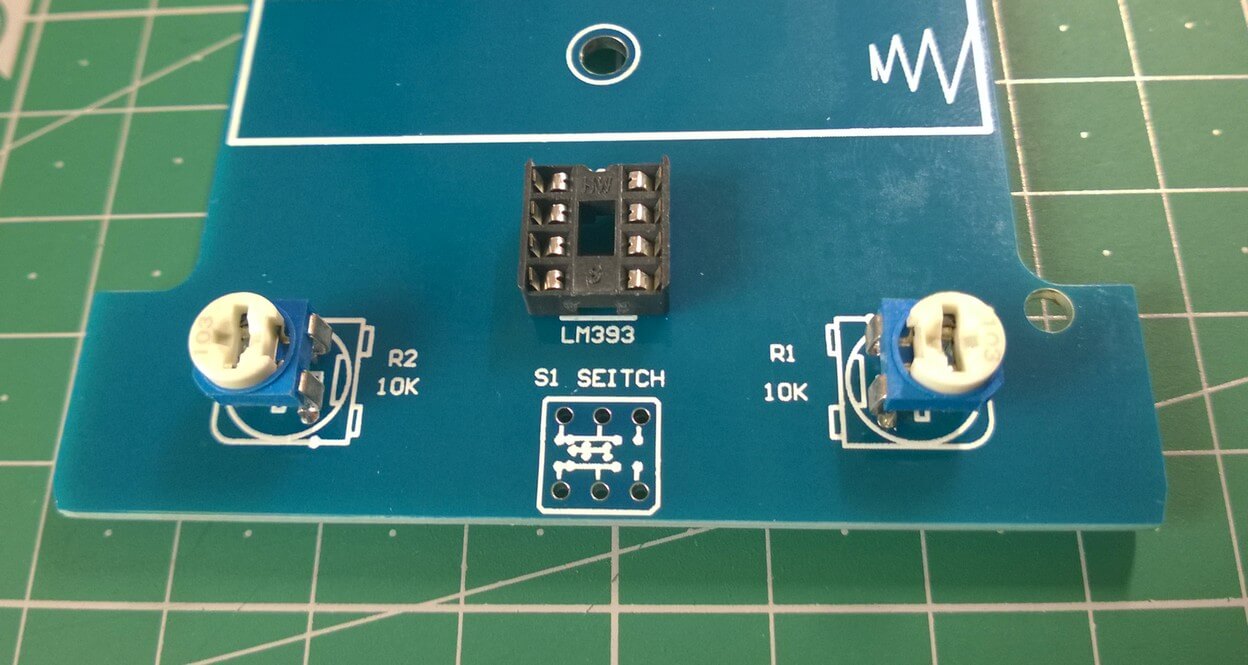
| 1 | LM393 Dual-Spannungs-Komparator | IC1 |
| 1 | IC-Sockel 8-pin | - |
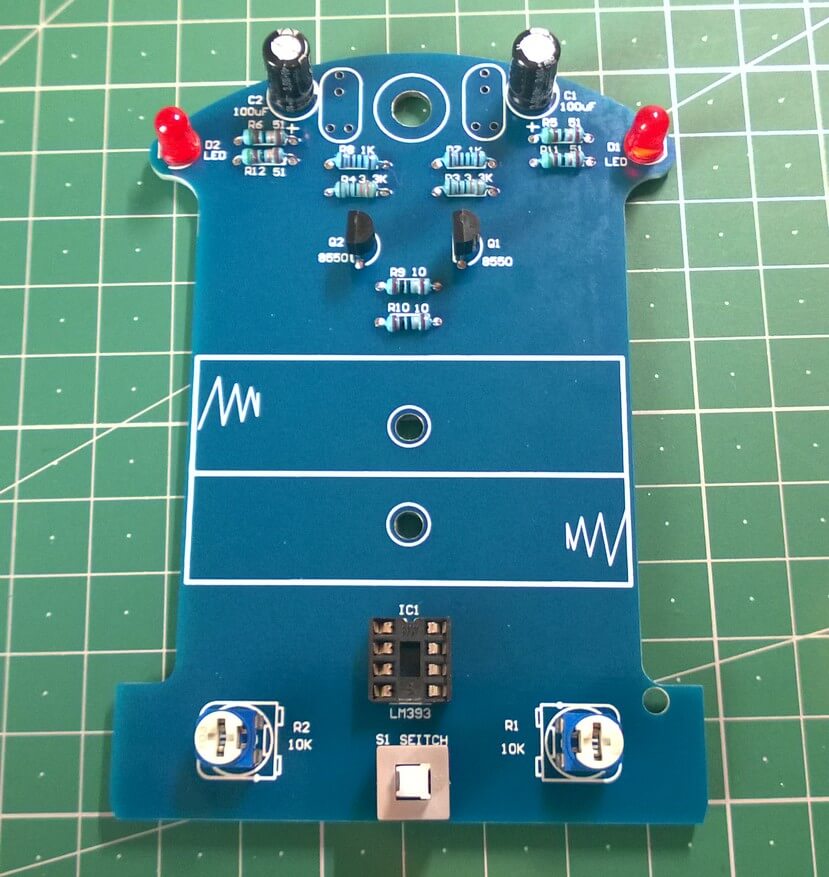
| 2 | 100µF Elektrolyt-Kondensator | C1, C2 |
| 2 | 10kΩ Trimm-Potentiometer | R1, R2 |
| 2 | 3,3kΩ Widerstand | R3, R4 |
| 4 | 51Ω Widerstand | R5, R6, R11, R12 |
| 2 | 1kΩ Widerstand | R7, R8 |
| 2 | 10Ω Widerstand | R9, R10 |
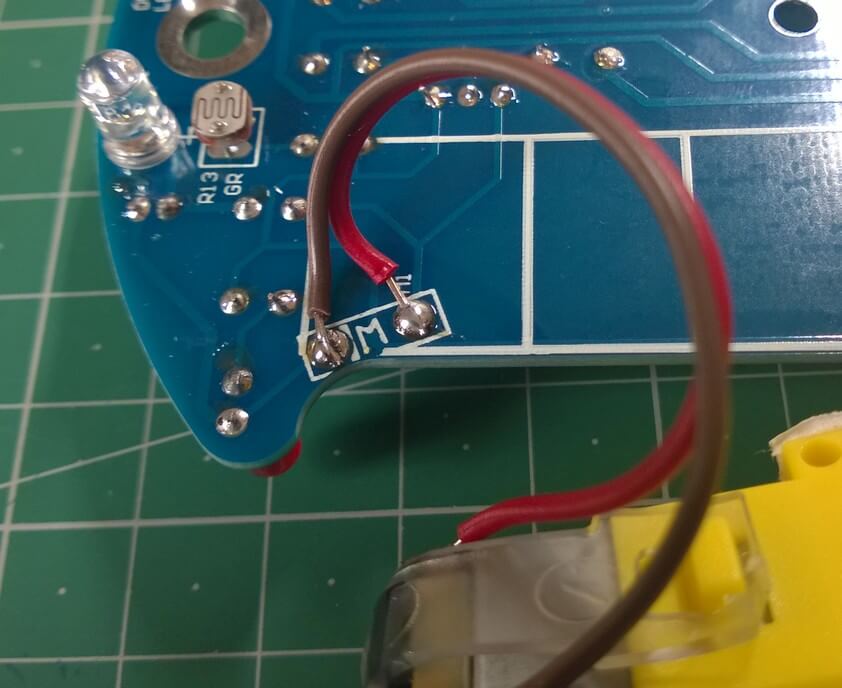
| 2 | Fotowiderstand (LDR) CDS5 | R13, R14 |
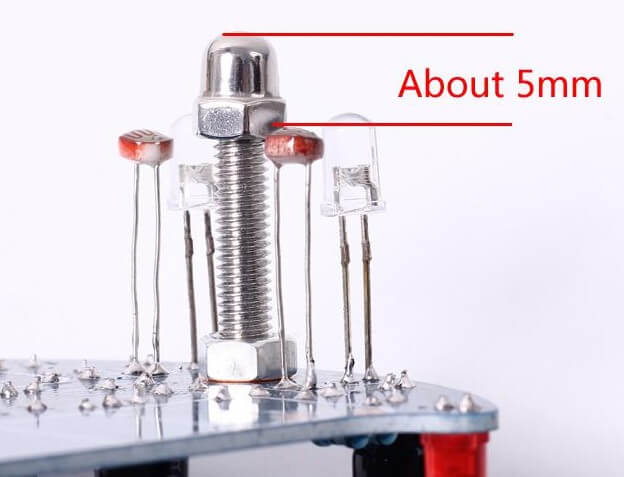
| 2 | LED, 5mm, rot (klar) | D4, D5 |
| 2 | LED, 5mm, rot (gefärbt) | D1, D2 |
| 2 | S8550 PNP Transistor | Q1, Q2 |
| 1 | Druckschalter | S1 |
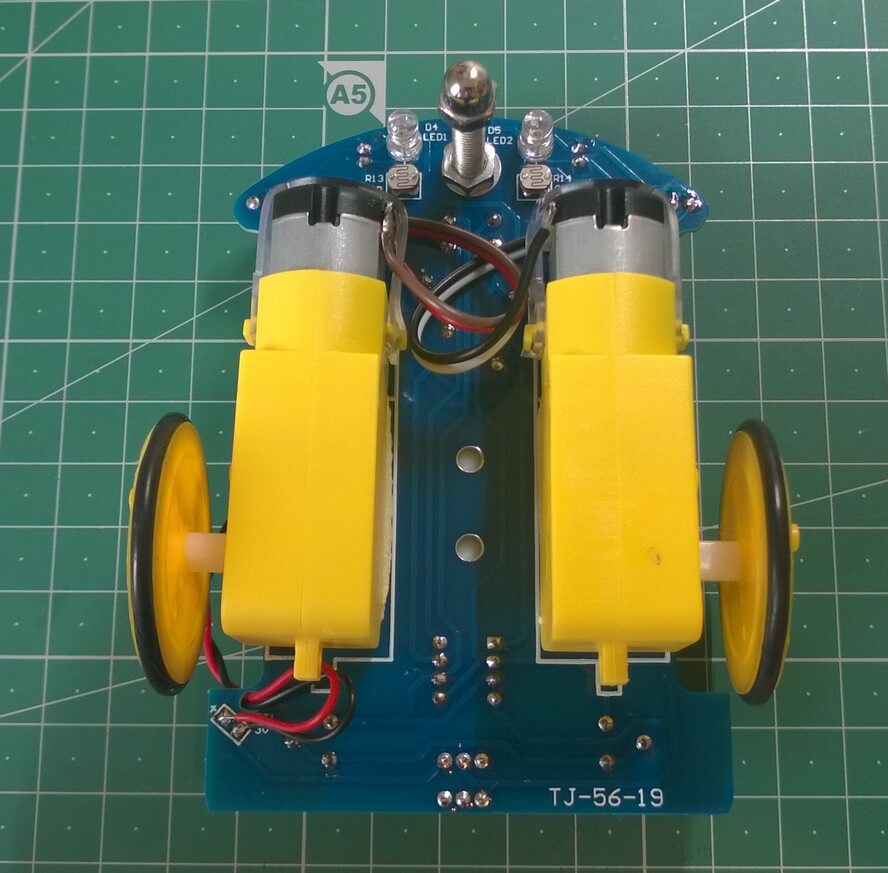
| 2 | Motoren JD3-100 | - |
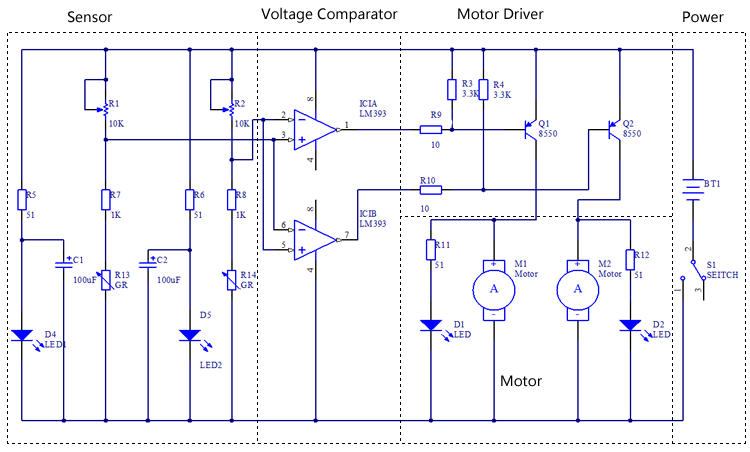
Die Logik des "Line-followers" ist recht einfach gemacht: Der LM393 ist ein doppelter Spannungs-Komparator, welcher über die beiden Fotowiderstände permanent die anliegende Spannung überprüft. Durch die dunkle Linie auf dem Boden kann das Licht der LED weniger stark reflektiert werden und damit liegt weniger Spannung auf einer als auf der anderen Seite des Roboters an und der LM393 stoppt den Motor der entsprechenden Seite, so dass eine Ausgleichsbewegung stattfindet.


Zunächst habe ich mir einen kleinen Parcour für den Roboter zusammengestellt, d.h. ich habe 20mm breite,
schwarze Linien auf DIN-4-Blätter gedruckt und diese dann entsprechend aneinander gelegt. So hat der Roboter
eine Bahn, die er entlang fahren kann.
Vor dem Start musste der Roboter noch mit den beiden Trimm-Potentiometern justiert werden, damit die
Ausgleichsbewegungen einigermaßen gleich sind. Im unten gezeigten Video kann man sehen, dass der Roboter
seine Aufgabe recht gut erfüllt.