
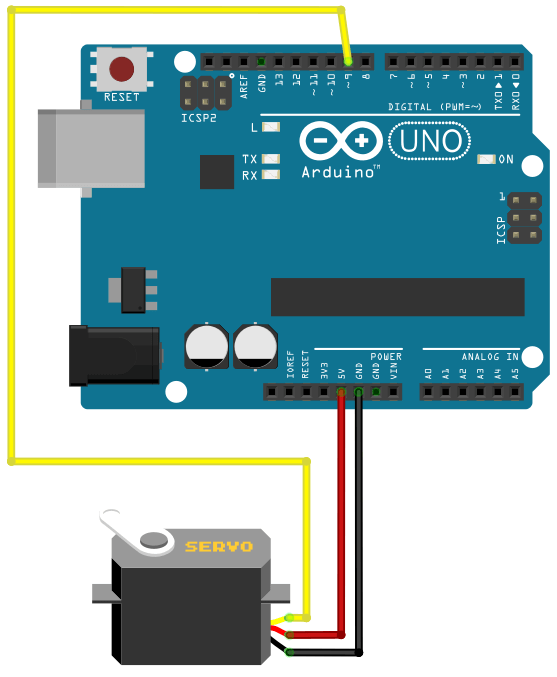
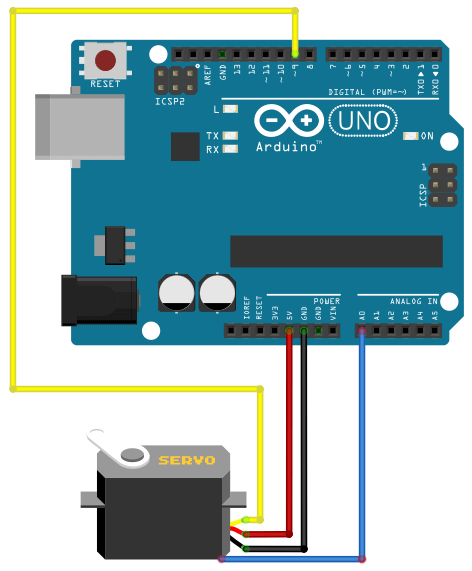
Eigentlich muss nur 5V mit dem roten Kabel, GND mit dem schwarzen Kabel und ein digitaler Pin mit PWM mit dem verbleibenden (meist gelben oder orangen Kabel) verbunden werden. Wichtig ist zu wissen, dass Servomotoren nur schlecht mit 3,3V laufen und daher oft beim Betrieb mit einer zu niedrigen Spannung brummen können, weil sie die Position nicht richtig einstellen können.
Achtung:
Da alle Gleichstrommotoren eine recht hohe Stromaufnahme haben, sollte man auch Servo-Motoren
NICHT direkt über die VCC-Pins des Mikrocontroller-Boards versorgen, sondern über eine externe Stromquelle (Batterie, Akku, etc.).
Der Mikrocontroller könnte sonst Schaden nehmen!
Der direkte Anschluss an den Arduino wurde hier nur zur Vereinfachung verwendet (Verwendung auf eigene Verantwortung!)
Mit der Library Servo, die
schon in der Arduino-IDE vorhanden ist, aber auch über GitHub bei
Arduino/libraries/Servo geladen
werden kann, ist eine Ansteuerung des Servos sehr einfach.
Hinweis: Die Zahl in servoMotor.write() ist immer der Winkel, der gestellt werden soll.
Wichtig: Die beiden letzten Parameter beim Aufruf von servoMotor.attach() entsprechen dem minimalen
und maximalen Verzögerungszeit des PWM-Signals und sollten für den Motor richtig gewählt werden, damit
die Stellwinkel auch wirklich stimmen!
#include <Servo.h>
#define SERVO_SIGNAL_PIN 9
Servo servoMotor;
void setup()
{
servoMotor.attach(SERVO_SIGNAL_PIN, 900, 1500);
}
void loop()
{
servoMotor.write(45);
delay(500);
servoMotor.write(135);
delay(500);
for(int i = 0; i<180; i+=5){
servoMotor.write(i);
delay(150);
}
delay(1000);
for(int i = 180; i>0; i-=5){
servoMotor.write(i);
delay(150);
}
}
Es ist auch möglich ohne Verwendung einer Library einen Servomotor mit einem Arduino anzusteuern.
Dazu muss zunächst ein HIGH über die Signalleitung geschickt werden. Anschließend ist eine Pause zwischen
1000µs bis 2000µs einzuhalten, je nachdem welcher Winkel gestellt werden soll. Dann folgt ein LOW, wobei
darauf noch eine kurze Pause von ca. 20ms folgen sollte, damit der Motor genug Zeit hat, sich vollständig
einzustellen.
In meinen Versuch ist aber herausgekommen, das es nicht der absolute Winkel ist, der gestellt wird, sondern
der relative, d.h. man verstellt durch setServoAngle() immer nur UM einen bestimmten Winkel und nicht AUF
einen Winkel. Außerdem ist der Servomotor nach dem Stellen manuell frei beweglich und nicht elektrisch
gesperrt.
#define SERVO_SIGNAL_PIN 8
void setup()
{
pinMode(SERVO_SIGNAL_PIN, OUTPUT);
for(int i=0; i<180; i+=5){
setServoAngle(i);
delay(100);
}
}
void loop()
{
}
void setServoAngle(byte angle)
{
// calculate angle to delayTime
int delayTime = map(angle, 0, 180, 1000, 2000);
digitalWrite(SERVO_SIGNAL_PIN, HIGH);
delayMicroseconds(delayTime);
digitalWrite(SERVO_SIGNAL_PIN, LOW);
delay(20); // short pause at the end of the regulating
}Einen speziellen Servo ist das folgende Modell, welches sich um 360° kontinuierlich drehen kann. Laut Hersteller besitzt es folgende Eigenschaften:
| Gewicht: | 38g |
|---|---|
| Abmessungen: | 40,8 × 20,0 × 39,5 mm |
| Geschwindigkeit: | 0,22s / 60° (bei 4,8V) |
| Betriebsspannung: | 4,8V - 6V |
| Betriebsstrom: | <1000mA |
| Drehmoment: | 5,5kg/cm (bei 4,8V) |

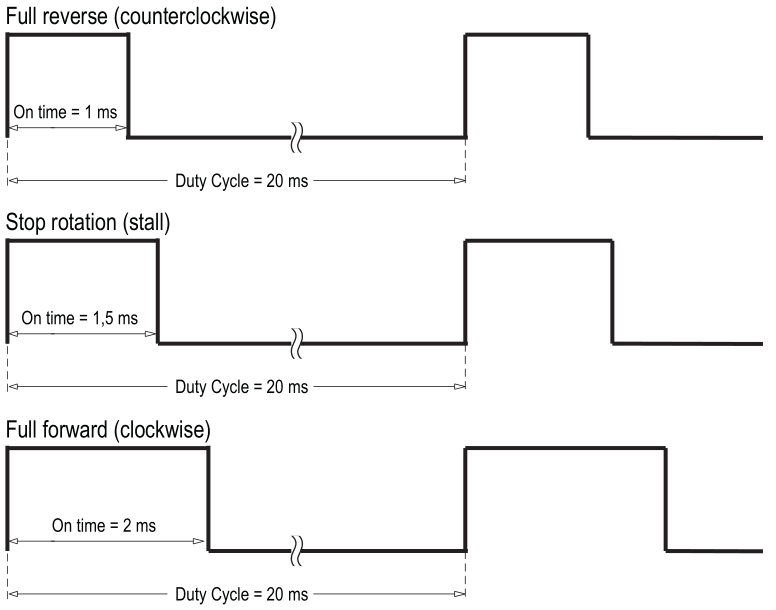
"The signal terminal needs to be input one 50 HZ square wave, then the duration of high level pulse,
which is used to control signal cycle, can control speed and forward/backward rotation as well as
stalling. The duration of A high level corresponds to a speed. When high level is 1ms~1.5ms, servo
rotates forward(the rotate speed is the fastest when it is 1ms, the later the lower, servo will stop
rotating when reaching 1.5ms). When high level is 1.5 ~2ms, the servo rotates backward (The servo stops
rotating when reaching 1.5ms, when the duration is closer to 2ms, the closer, the faster. The backward
rotation speed is the fastest when reaching 2ms)
This servo carries meso-position adjustment potentiometer(it can only be seen by peeling off the outer
cover and circuit board). We can set high level pulse at 1.5ms to observe that whether servo stops
rotating. If it doesn’t stop rotating, we keep adjusting the potentiometer until it does.
Just enter the square wave signal terminal a 50Hz signal, and then controls the duration of the
high-level pulse signal cycle can control the speed and reversing and stalling. A high level pulse
corresponds to the duration of a speed. HIGH 1 ms - 1.5 ms, Steering gear forward (1 msec fastest
forward, closer to 1.5 milliseconds slower, 1.5 ms Steering gear stalled), the high level of 1.5 ms
to 2 ms when the Steering gear reverse (1.5 ms Steering gear stalling, the closer the faster reverse
speed 2 ms, 2 ms fastest reversal)
Note: This servo can draw relatively high currents, especially with load. (up to approximately 1000mA
at 4.8V at standstill) So choose a suitable power supply for the servo. It is not recommended to take
the Arduino power."
#include <Servo.h>
#define SERVO_SIGNAL_PIN 9
// define the duration of the signal in milliseconds
#define STOP 1500
#define ROTATE_CLOCKWISE 1000
#define ROTATE_COUNTERCLOCKWISE 2000
Servo servoMotor;
void setup()
{
servoMotor.attach(SERVO_SIGNAL_PIN);
servoMotor.writeMicroseconds(STOP);
delay(2000);
servoMotor.writeMicroseconds(ROTATE_CLOCKWISE);
delay(2000);
servoMotor.writeMicroseconds(ROTATE_COUNTERCLOCKWISE);
delay(2000);
servoMotor.writeMicroseconds(STOP);
}
void loop()
{
}
Einige Servo-Motoren, wie der Adafruit Micro Servo oder
der Feetech FT90M-FB haben zusätzlich zu den drei
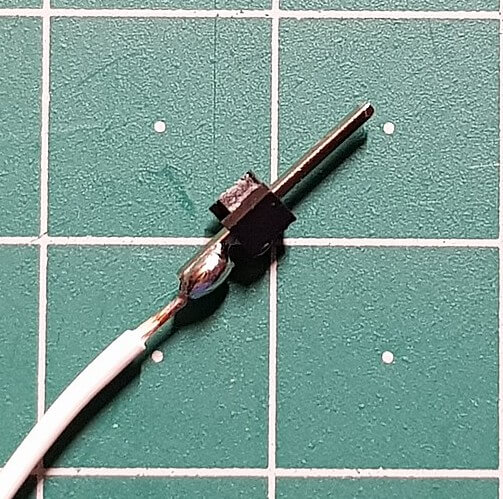
Standard-Anschlüssen eine weitere sog. Feedback-Leitung. Hierbei geht ein Kabel vom internen Potentiometer
des Servos zurück und kann als Sensor-Anschluss z.B. beim Arduino verwendet werden. Dies ist hilfreich,
wenn man den absoluten Stellwert des Servos auslesen und kennen möchte.
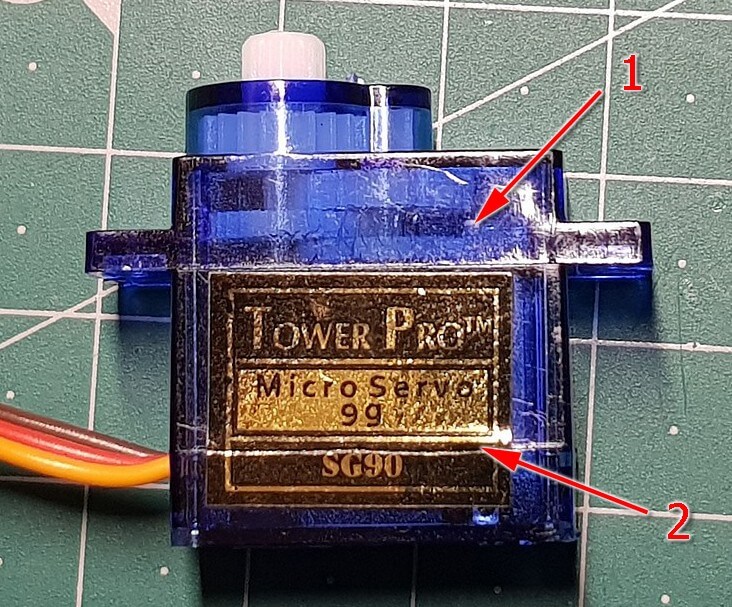
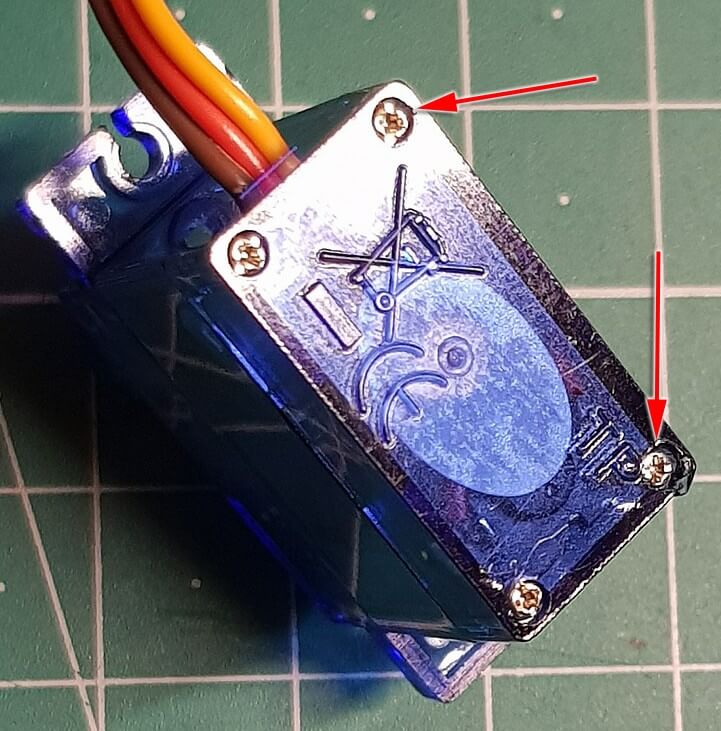
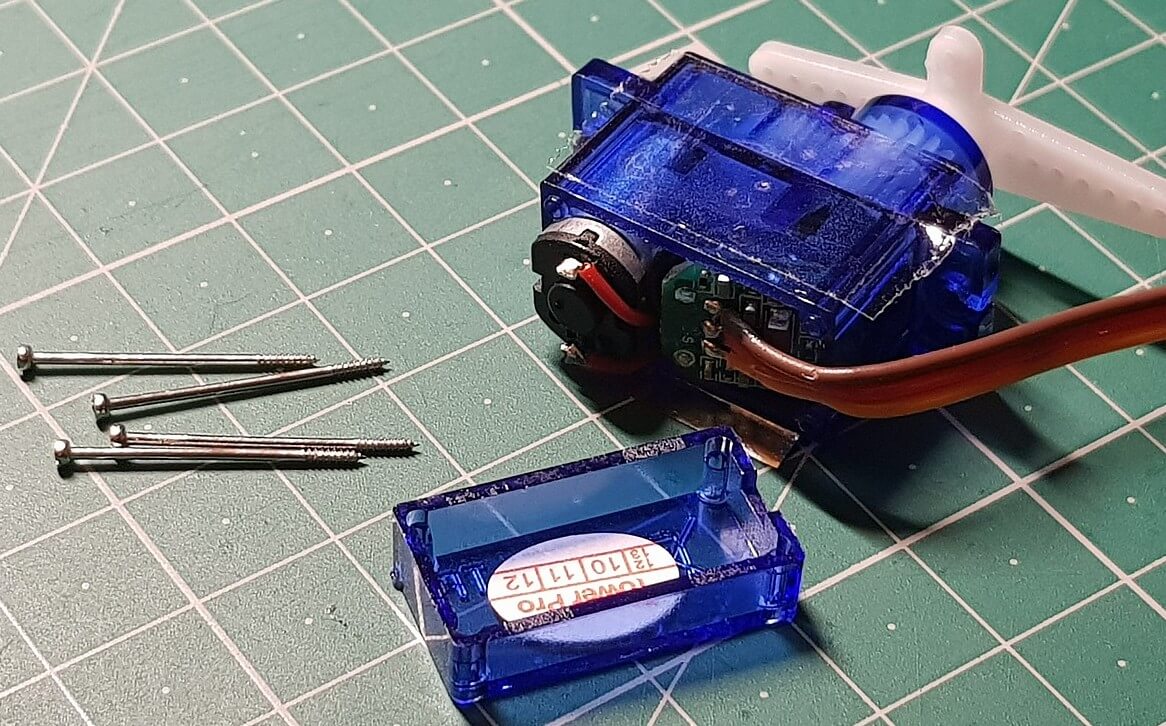
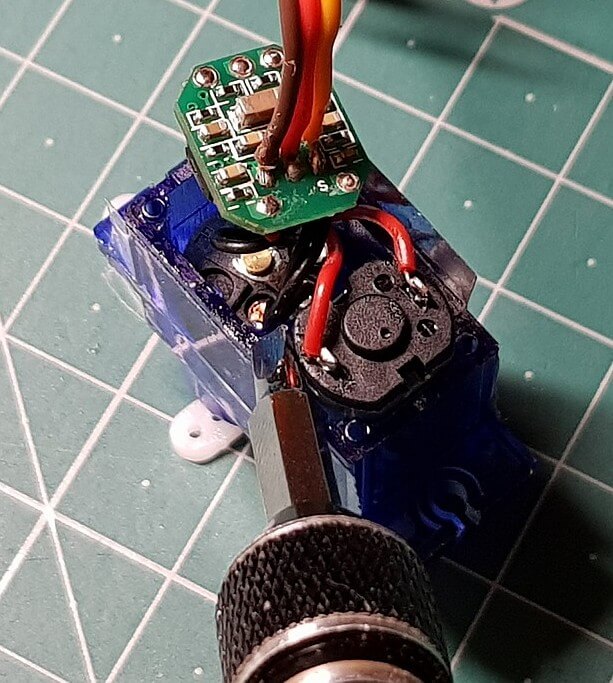
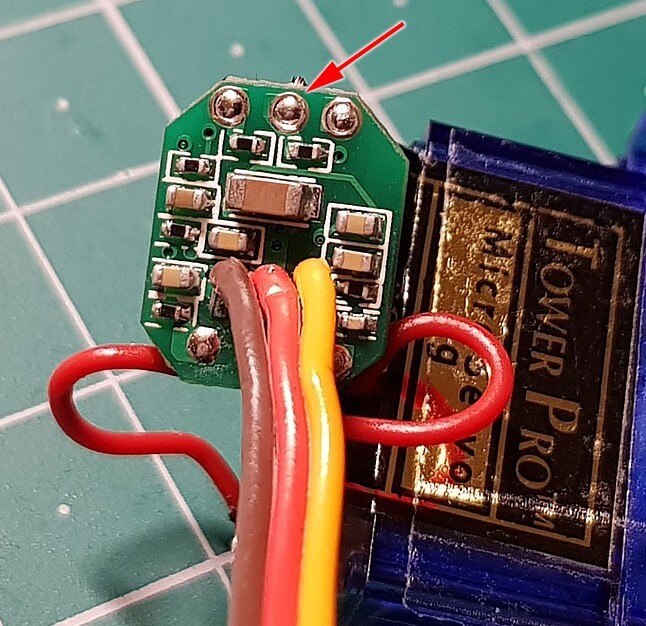
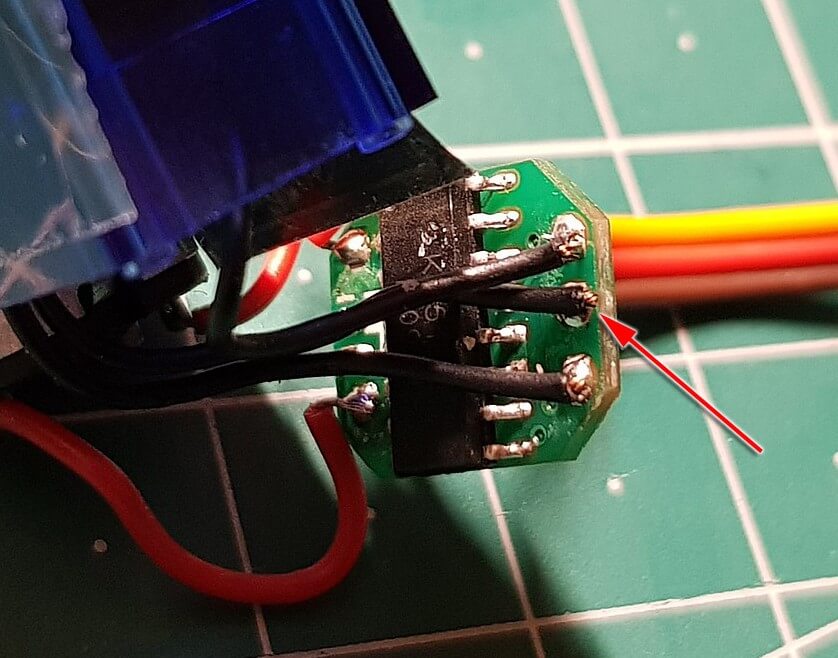
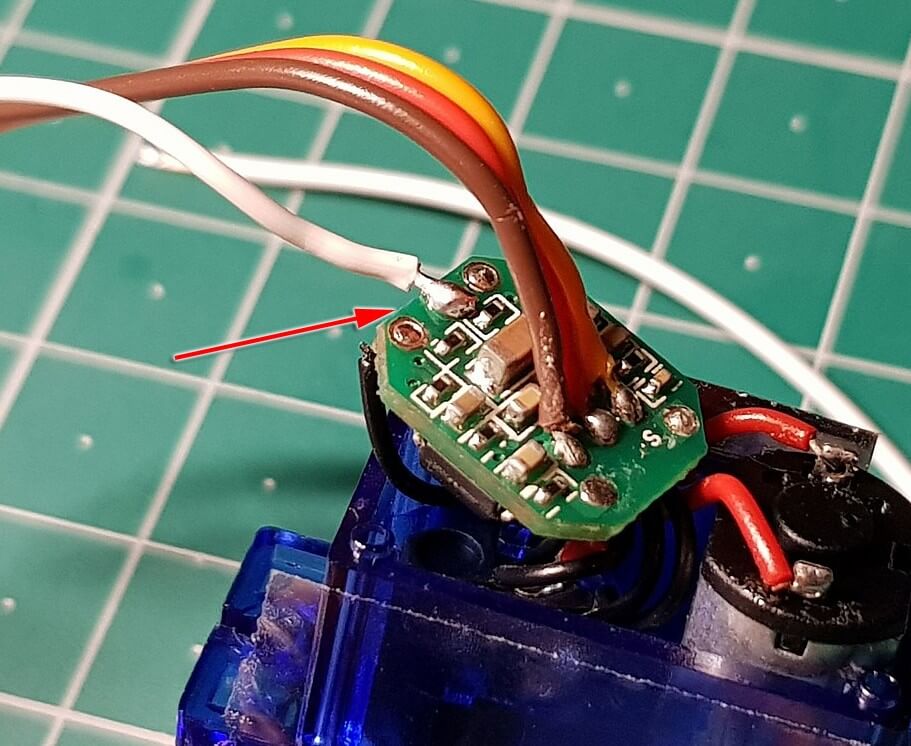
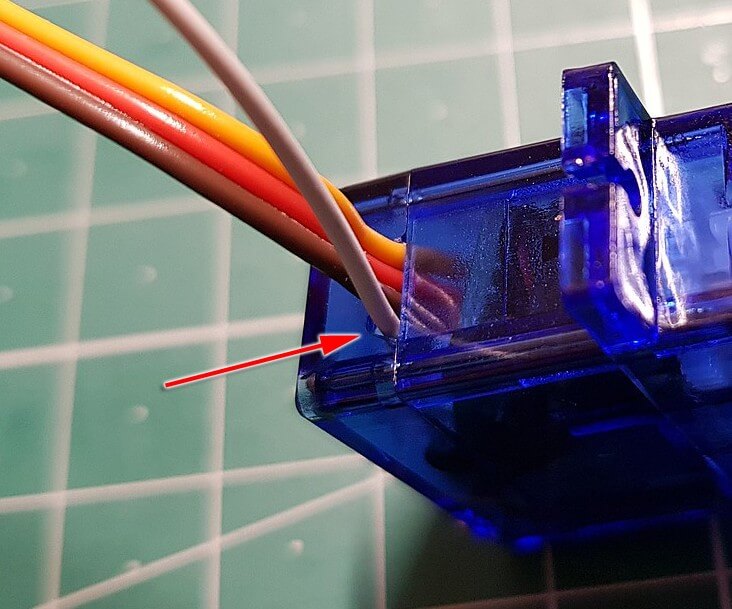
Die einfachen Servo-Motoren, wie z.B. der populäre SG90, besitzt keinen solchen Feedback-Anschluss. Jedoch kann
mit recht geringem Aufwand auch solch ein normaler Servo mit einem Feedback-Kanal nachgerüstet werden. Dazu
ist lediglich ein weiteres Kabel nötig, welches in etwa denselben Durchmesser wie die anderen Servokabel haben.
Der folgende Sketch kalibriert zunächst einmal die Werte, die vom analogen Feedback bei 0° und 180°-Drehung zurückgeliefert werden. Dann werden verschiedene Stellwinkel an den Servo geschickt. Wenn man die hier verwendete Funktion setMotorAngle() verwendet, muss keine Verzögerung nach dem Stell-Befehl eingebaut werden, denn die Funktion wartet wirklich nur so lange, bis der interne Potentiometer über das Feedback-Kabel meldet, dass der gewünschte Winkel eingestellt wurde. (Die 5000ms-Verzögerungszeiten sind lediglich zur besseren Veranschaulichung)
#include <Servo.h>
#define SERVO_SIGNAL_PIN 9
#define PIN_FEEDBACK A0
int valMin = 0, valMax = 0;
Servo servoMotor;
void setup()
{
Serial.begin(9600);
servoMotor.attach(SERVO_SIGNAL_PIN, 900, 1500);
pinMode(PIN_FEEDBACK, INPUT);
Serial.print("Calibrating servo...");
servoMotor.write(0);
delay(1000);
valMin = analogRead(PIN_FEEDBACK);
servoMotor.write(180);
delay(1000);
valMax = analogRead(PIN_FEEDBACK);
Serial.println("[ok]");
}
void loop()
{
for (int i = 0; i <= 180; i += 10) {
setMotorAngle(i);
}
for (int i = 180; i >= 0; i -= 10) {
setMotorAngle(i);
}
delay(5000);
setMotorAngle(0);
setMotorAngle(135);
setMotorAngle(45);
setMotorAngle(180);
setMotorAngle(90);
delay(5000);
}
void setMotorAngle(int angle)
{
servoMotor.write(angle);
while (abs(angle - map(analogRead(PIN_FEEDBACK), valMin, valMax, 0, 180)) > 5) {
}
}